SVJETLOTEHNIČKI IZRAČUNI
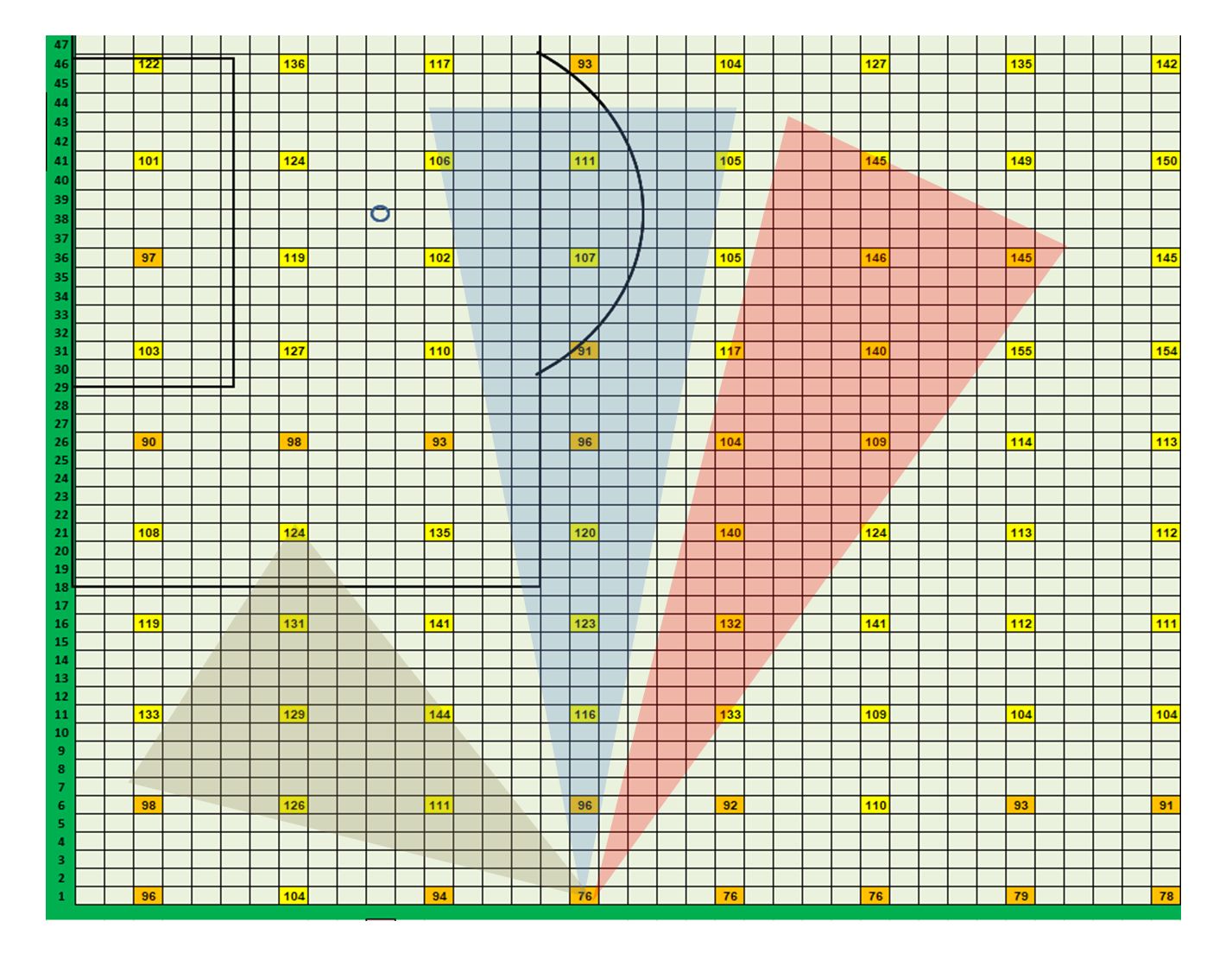
Svjetlotehnički izračun pokazuje distribuciju i linearnost osvjetljenja terena. Ulazni podaci su geometrija terena, raspored, broj i visina stupova te željeno osvjetljenje izraženo u luksima. Izlazni podaci su potrebni broj reflektora tipa LRP, svjetlosni potencijal u lumenima te širina svjetlosnog snopa za svaki reflektor u stupnjevima. Važan izlazni podatak je i usmjerenje reflektora na nosaču. Vertikalno usmjerenje određuje da li će reflektor osvjetljavati podnožje stupa ili poziciju od stupa prema suprotnoj strani, a oznaka mu je T od „tilt“ ili pomak po vertikali. Horizontalno usmjerenje određuje pomak lijevo ili desno od stupa. Budući najčešće postoje i nasuprotni stupovi, lijevo i desno definiramo rotacijom do zadane radno točke RT. Izračun daje podatke osvjetljenosti za svaki kvadratni metar terena, maksimalnu (MAX), minimalnu (MIN) te srednju (AVG) osvjetljenost. Omjer minimalne i maksimalne osvjetljenosti je faktor linearnosti (L) distribucije svjetla po terenu (>0,5)
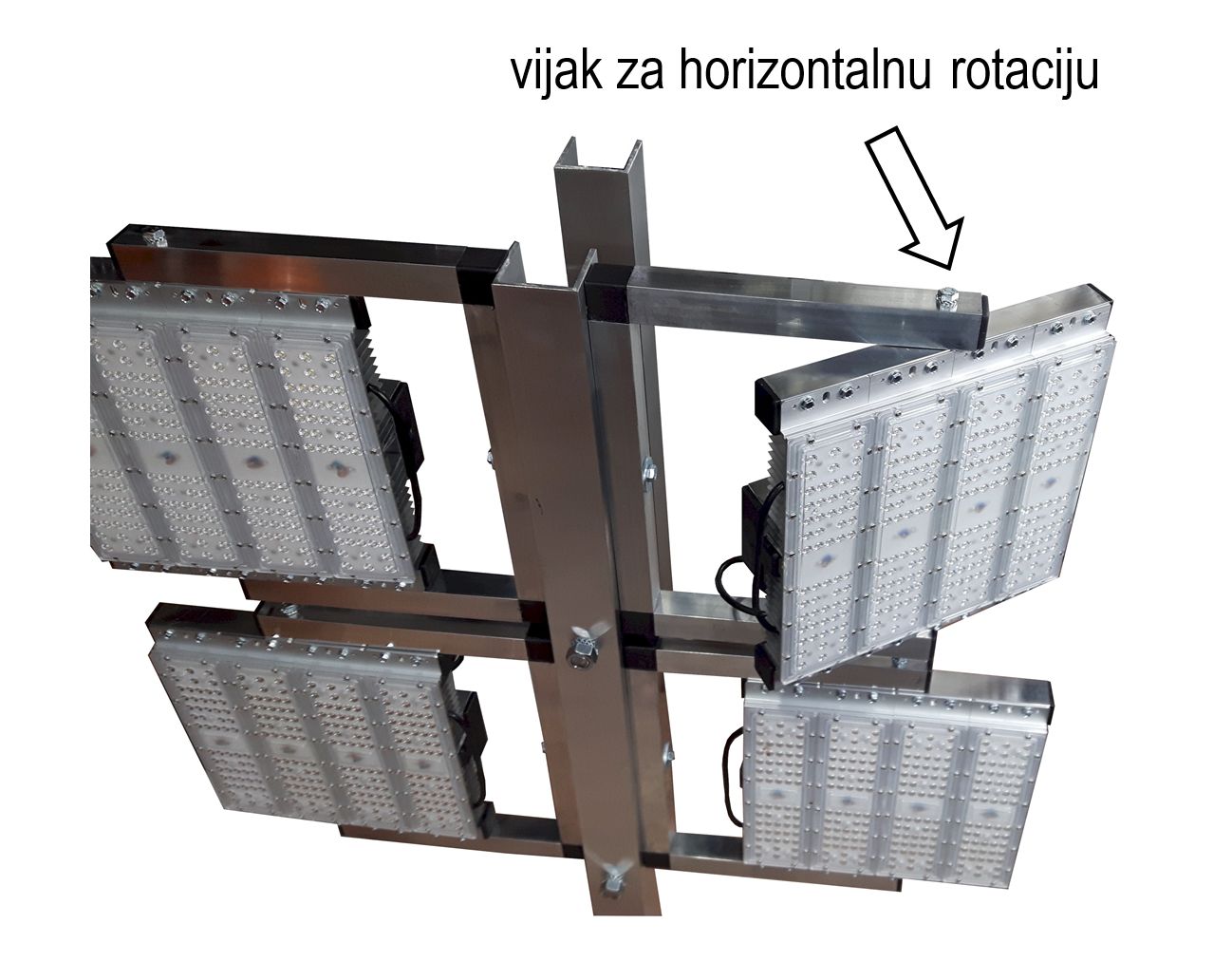
REGULACIJA POLOŽAJA
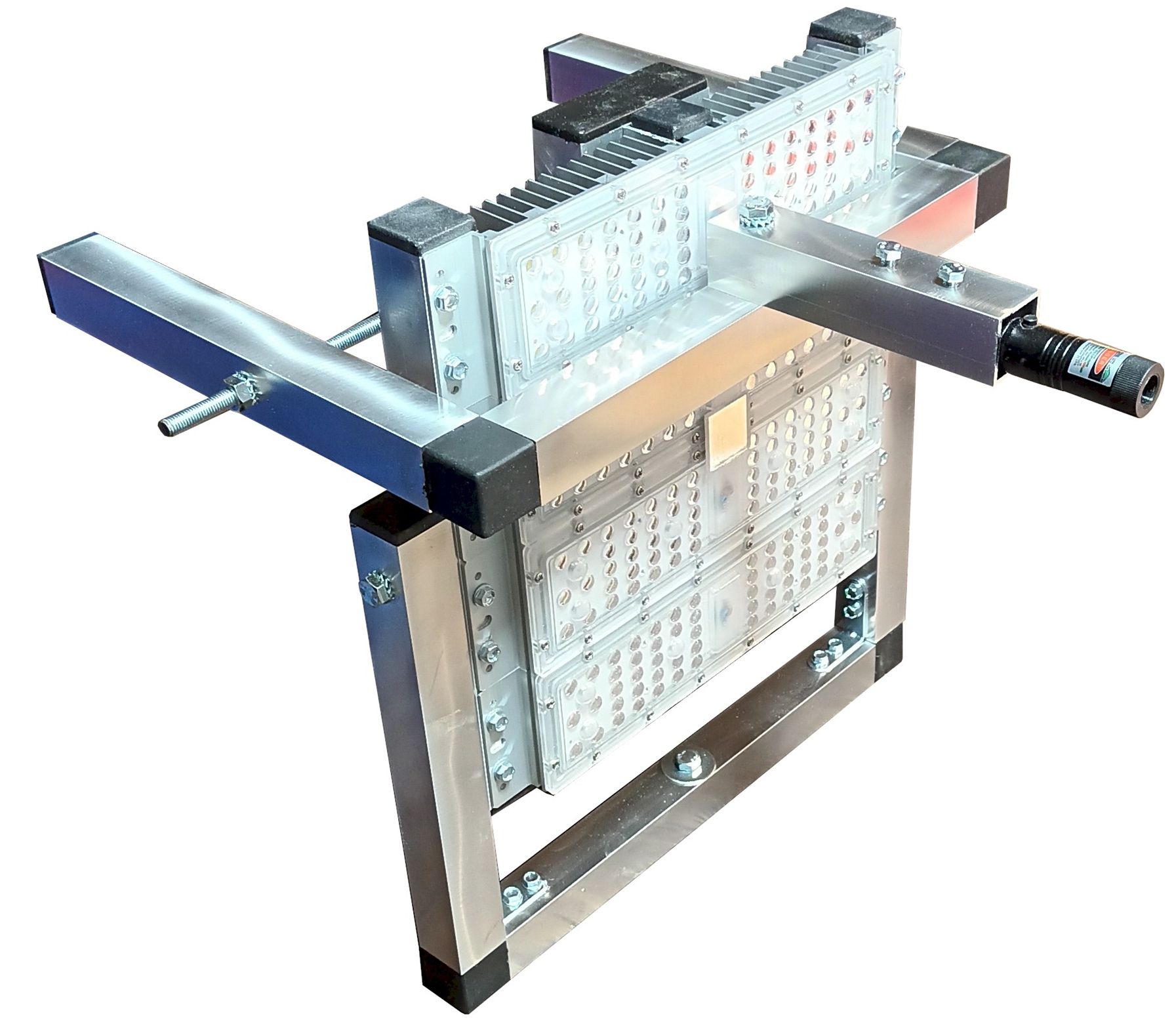
Svaki reflektor moguće je usmjeriti u željenom pravcu po vrertikali i horizontali. Time se snop svjetlosti usklađuje s podacima iz svjetlotehničkog izračuna. Vertikalna rotacija namješta se jednim pričvrsnim vijkom M8 koji se priteže na nosač. Opseg regulacije je 360°. Horizontalna rotacija namješta se s dva bočna vijka M8 na svakom reflektoru. Opseg regulacije je +/- 180°. Položaj reflektora moguće je odrediti i prema zadanoj radnoj točki RT na terenu određenu koordinatama (XRT;YRT). Najlakše pozicioniranje je laserskim markerom sa kućišta reflektora prema željenoj točki.


Položaj reflektora moguće je odrediti i prema zadanoj radnoj točki RT na terenu određenu koordinatama (XRT;YRT). Najlakše pozicioniranje je laserskim markerom sa kućišta reflektora prema željenoj točki.
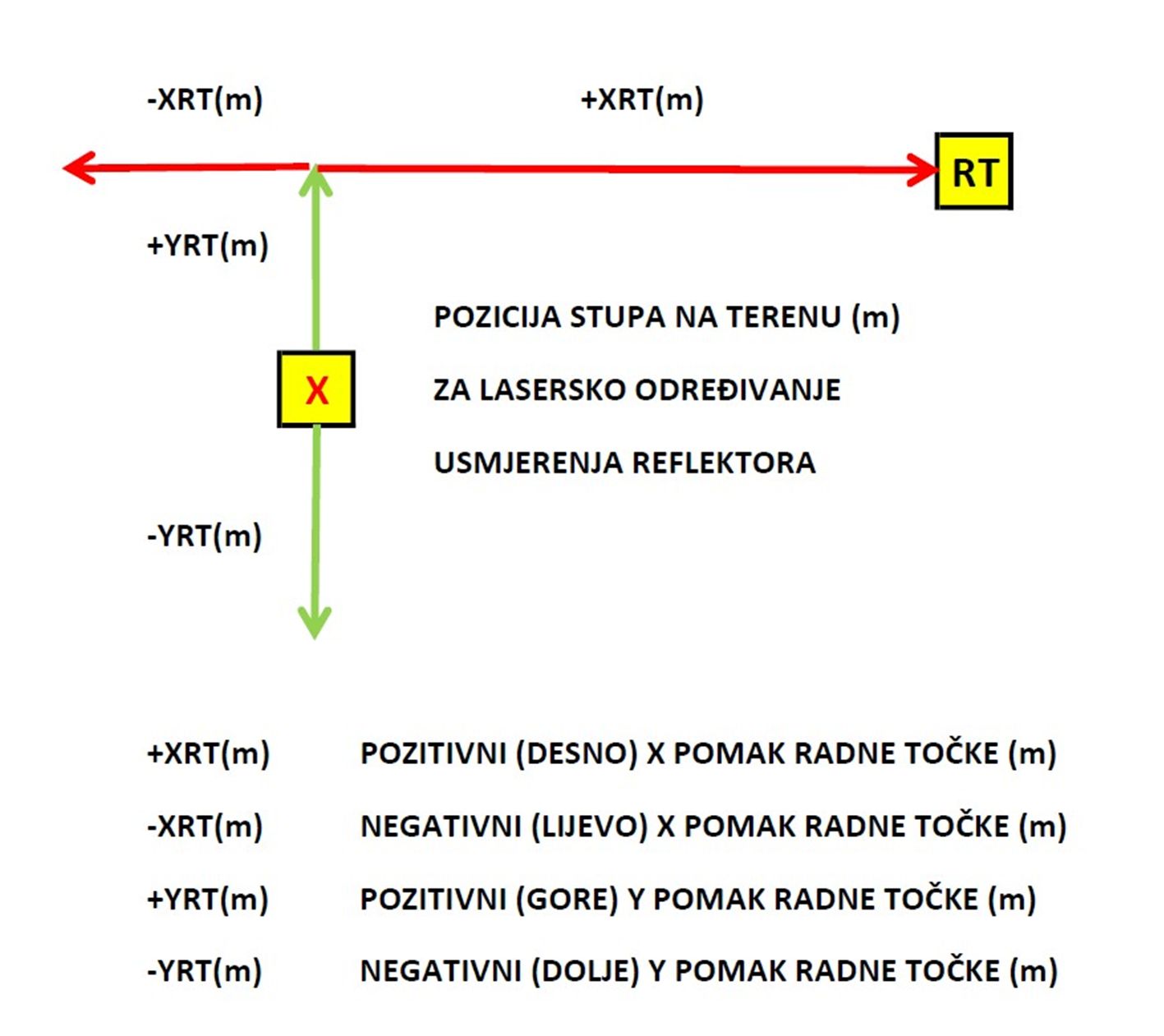
POZICIONIRANJE LASEROM
Svaki reflektor potrebno je usmjeriti u zadanu radnu točku RT prema svjetlotehničkom izračunu određenu koordinatama (XRT;YRT). To se postiže zakretanjem reflektora po X i po Y osi i navođenjem laserske zrake u RT. Koristeći građevinski ili laserski metar izmjeri se od temelja stupa zahtjevanih X odnosno Y metara. Tlocrtna površina terena prema svjetlotehničkom izračunu prepoznaje +X(m) u desnom smjeru, te –X(m) u lijevom smjeru od temelja stupa odnosno +Y(m) više, te –Y(m) niže od stupa. Laserski marker natiče se na vrh reflektora. Konstruiran je tako da zadržava ortogonalnost i pouzdano zrači u pravilnom smjeru.